

-
- 公司:
- 佛山基准非标机械设计有限公司
-
- 联系:
- 龚先生
-
- 手机:
-
13807495700
13808412765
-
- 地址:
- 佛山市顺德区北滘镇三乐路北一号广东工业设计城D栋东座1楼
-
- 微信:
-

本站共被浏览过 4086081 次


- 怎样生产制造非标自动化设备?7378阅读 2022-02-10 20:48:24
- 开发非标自动化设备的难点7239阅读 2022-02-10 20:47:09
- 数控自动化设备的需求7118阅读 2022-02-10 20:45:45
- 分析工业控制自动化设备的发展趋势7089阅读 2022-02-10 20:44:42
- 自动螺丝机选择正确螺丝的重要性7224阅读 2022-02-10 20:29:32

产品信息
您所在的位置:首页 > 详细信息
广州非标自动化设备公司,新设备研发设计,本地技术团队
2025-09-16 02:37:02 2125次浏览
价 格:3000
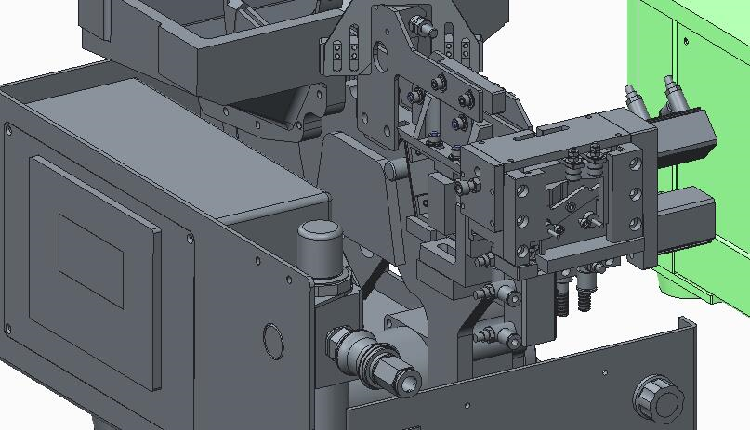
机器人力检测
力传感器通常安装在操作臂下述三个位置:
1、安装在关节驱动器上。可测量驱动器/减速器自身的力矩或者力的输出。但不能很好地检测末端执行器与环境之间的接触力。
2、安装在末端执行器与操作臂的终端关节之间,可称腕力传感器。通常,可以测量施加于末端执行器上的三个到六个力/力矩分量。
3、安装在末端执行器的“指尖”上。通常,这些带有力觉得手指内置了应变计,可以测量作用在指尖上的一个到四个分力。
七、机器人-环境交互系统
1、机器人-环境交互系统是实现工业机器人与外部环境中的设备相互联系和协调的系统。
2、工业机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等;也可以是多台机器人、多台机床或设备、多个零件存储装置等集成 。
3、也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。
八、人机交互系统
人机交互系统是使操作人员参与机器人控制并与机器人进行联系的装置。该系统归纳起来分为两大类: 指令给定装置和信息显示装置。
-
 机械设备设计中需要考虑哪些重要因素?在当今工业化社会中,机械设备在各个领域都发挥着重要的作用。从精细的医疗设备到复杂的工业生产线,机械设备的设计与制造都需经过深思熟虑。那么,在机械设备设计过程中,需要考虑哪些重要因素呢?让我们一起探讨以下方24-01-11 23:48:01
机械设备设计中需要考虑哪些重要因素?在当今工业化社会中,机械设备在各个领域都发挥着重要的作用。从精细的医疗设备到复杂的工业生产线,机械设备的设计与制造都需经过深思熟虑。那么,在机械设备设计过程中,需要考虑哪些重要因素呢?让我们一起探讨以下方24-01-11 23:48:01 -
 机械设计的基本要求包括以下几点:实现预定的功能,并能在规定的工作条件下、规定的工作期限内正常运行。这是机械设计的首要目标,机械产品必须能够完成预定的功能,并保证在规定的工作条件和期限下正常运行。满足可靠性要求。机械系统的可靠性与其零部件数量24-01-11 23:45:01
机械设计的基本要求包括以下几点:实现预定的功能,并能在规定的工作条件下、规定的工作期限内正常运行。这是机械设计的首要目标,机械产品必须能够完成预定的功能,并保证在规定的工作条件和期限下正常运行。满足可靠性要求。机械系统的可靠性与其零部件数量24-01-11 23:45:01 -
 机械设计基础和机械设计区别如下:区别是机械设计是更专业,更深层次的知识。机械设计基础顾名思义,就是机械设计类的基础知识。机械设计基础是机械工程的重要组成部分。机械设计基础是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是在各种24-01-11 23:42:01
机械设计基础和机械设计区别如下:区别是机械设计是更专业,更深层次的知识。机械设计基础顾名思义,就是机械设计类的基础知识。机械设计基础是机械工程的重要组成部分。机械设计基础是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是在各种24-01-11 23:42:01 -
 机械设计的一般步骤如下:一、需求分析:任何一个设计项目都需要从需求出发,机械设备设计也不例外。在这一阶段,设计师需要与客户进行充分的沟通,了解客户的需求和期望。同时,还要考虑到设备的使用环境、功能要求、技术指标等因素,为后续的设计工作打下基24-01-11 23:39:01
机械设计的一般步骤如下:一、需求分析:任何一个设计项目都需要从需求出发,机械设备设计也不例外。在这一阶段,设计师需要与客户进行充分的沟通,了解客户的需求和期望。同时,还要考虑到设备的使用环境、功能要求、技术指标等因素,为后续的设计工作打下基24-01-11 23:39:01 -
 机械设备设计中需要考虑哪些重要因素?在当今工业化社会中,机械设备在各个领域都发挥着重要的作用。从精细的医疗设备到复杂的工业生产线,机械设备的设计与制造都需经过深思熟虑。那么,在机械设备设计过程中,需要考虑哪些重要因素呢?让我们一起探讨以下方24-01-11 23:36:01
机械设备设计中需要考虑哪些重要因素?在当今工业化社会中,机械设备在各个领域都发挥着重要的作用。从精细的医疗设备到复杂的工业生产线,机械设备的设计与制造都需经过深思熟虑。那么,在机械设备设计过程中,需要考虑哪些重要因素呢?让我们一起探讨以下方24-01-11 23:36:01 -
 机械设计的一般步骤如下:一、需求分析:任何一个设计项目都需要从需求出发,机械设备设计也不例外。在这一阶段,设计师需要与客户进行充分的沟通,了解客户的需求和期望。同时,还要考虑到设备的使用环境、功能要求、技术指标等因素,为后续的设计工作打下基24-01-11 23:33:01
机械设计的一般步骤如下:一、需求分析:任何一个设计项目都需要从需求出发,机械设备设计也不例外。在这一阶段,设计师需要与客户进行充分的沟通,了解客户的需求和期望。同时,还要考虑到设备的使用环境、功能要求、技术指标等因素,为后续的设计工作打下基24-01-11 23:33:01 -
 机械设计基础的意义:机械设计基础是机械工程的重要组成部分,是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是:在各种限定的条件(如材料、加工能力、理论知识和计算手段等)下设计出的机械,即做出优化设计。优化设计需要综合地考虑许多24-01-11 23:30:01
机械设计基础的意义:机械设计基础是机械工程的重要组成部分,是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是:在各种限定的条件(如材料、加工能力、理论知识和计算手段等)下设计出的机械,即做出优化设计。优化设计需要综合地考虑许多24-01-11 23:30:01 -
 机械设计的一般步骤如下:一、需求分析:任何一个设计项目都需要从需求出发,机械设备设计也不例外。在这一阶段,设计师需要与客户进行充分的沟通,了解客户的需求和期望。同时,还要考虑到设备的使用环境、功能要求、技术指标等因素,为后续的设计工作打下基24-01-11 23:27:01
机械设计的一般步骤如下:一、需求分析:任何一个设计项目都需要从需求出发,机械设备设计也不例外。在这一阶段,设计师需要与客户进行充分的沟通,了解客户的需求和期望。同时,还要考虑到设备的使用环境、功能要求、技术指标等因素,为后续的设计工作打下基24-01-11 23:27:01 -
 机械设计需要具备哪些基础知识?基本知识:机械制图数学 理论力学 材料力学 机械设计 机械原理 机械制造电路原理(虽然看起来是电气学的,但是机械的人一定要掌握电路)弹性力学(主要有限元分析方面)数值分析 TRIZ 机械工程控制微机原理 (前面24-01-11 23:24:02
机械设计需要具备哪些基础知识?基本知识:机械制图数学 理论力学 材料力学 机械设计 机械原理 机械制造电路原理(虽然看起来是电气学的,但是机械的人一定要掌握电路)弹性力学(主要有限元分析方面)数值分析 TRIZ 机械工程控制微机原理 (前面24-01-11 23:24:02 -
 主要流程1、根据用户订货、市场需要和新科研成果制定设计任务。2、初步设计。包括确定机械的工作原理和基本结构形式,进行运动设计、结构设计并绘制初步总图以及初步审查。3、技术设计。包括修改设计(根据初审意见)、绘制全部零部件和新的总图以及第二次24-01-11 23:21:01
主要流程1、根据用户订货、市场需要和新科研成果制定设计任务。2、初步设计。包括确定机械的工作原理和基本结构形式,进行运动设计、结构设计并绘制初步总图以及初步审查。3、技术设计。包括修改设计(根据初审意见)、绘制全部零部件和新的总图以及第二次24-01-11 23:21:01 -
机械设计的一般过程及方法:1、确定设计任务需要提出设计任务书,其中包含提出任务、分析需求和确定任务三个步骤。2、方案设计根据制定的设计任务书进行方案设计,对设备的功能、用材、原理等提出可能的解决方案并反复确认,确认一个选定的方案。3、技术设24-01-11 23:18:01
-
 机械设计为机械工程的重要组成部分,是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是:在各种限定的条件(如材料、加工能力、理论知识和计算手段等)下设计出的机械,即做出优化设计。优化设计需要综合地考虑许多要求,一般有:工作性能、24-01-11 23:15:01
机械设计为机械工程的重要组成部分,是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是:在各种限定的条件(如材料、加工能力、理论知识和计算手段等)下设计出的机械,即做出优化设计。优化设计需要综合地考虑许多要求,一般有:工作性能、24-01-11 23:15:01 -
 机械设备设计中需要考虑哪些重要因素?在当今工业化社会中,机械设备在各个领域都发挥着重要的作用。从精细的医疗设备到复杂的工业生产线,机械设备的设计与制造都需经过深思熟虑。那么,在机械设备设计过程中,需要考虑哪些重要因素呢?让我们一起探讨以下方24-01-11 23:12:02
机械设备设计中需要考虑哪些重要因素?在当今工业化社会中,机械设备在各个领域都发挥着重要的作用。从精细的医疗设备到复杂的工业生产线,机械设备的设计与制造都需经过深思熟虑。那么,在机械设备设计过程中,需要考虑哪些重要因素呢?让我们一起探讨以下方24-01-11 23:12:02 -
 机械设计的基本要求包括以下几点:实现预定的功能,并能在规定的工作条件下、规定的工作期限内正常运行。这是机械设计的首要目标,机械产品必须能够完成预定的功能,并保证在规定的工作条件和期限下正常运行。满足可靠性要求。机械系统的可靠性与其零部件数量24-01-11 23:09:01
机械设计的基本要求包括以下几点:实现预定的功能,并能在规定的工作条件下、规定的工作期限内正常运行。这是机械设计的首要目标,机械产品必须能够完成预定的功能,并保证在规定的工作条件和期限下正常运行。满足可靠性要求。机械系统的可靠性与其零部件数量24-01-11 23:09:01 -
机械设计的基本要求包括以下几点:实现预定的功能,并能在规定的工作条件下、规定的工作期限内正常运行。这是机械设计的首要目标,机械产品必须能够完成预定的功能,并保证在规定的工作条件和期限下正常运行。满足可靠性要求。机械系统的可靠性与其零部件数量24-01-11 23:06:01
-
 机械设计的基本要求包括以下几点:实现预定的功能,并能在规定的工作条件下、规定的工作期限内正常运行。这是机械设计的首要目标,机械产品必须能够完成预定的功能,并保证在规定的工作条件和期限下正常运行。满足可靠性要求。机械系统的可靠性与其零部件数量24-01-11 23:03:01
机械设计的基本要求包括以下几点:实现预定的功能,并能在规定的工作条件下、规定的工作期限内正常运行。这是机械设计的首要目标,机械产品必须能够完成预定的功能,并保证在规定的工作条件和期限下正常运行。满足可靠性要求。机械系统的可靠性与其零部件数量24-01-11 23:03:01 -
主要流程1、根据用户订货、市场需要和新科研成果制定设计任务。2、初步设计。包括确定机械的工作原理和基本结构形式,进行运动设计、结构设计并绘制初步总图以及初步审查。3、技术设计。包括修改设计(根据初审意见)、绘制全部零部件和新的总图以及第二次24-01-11 23:00:01
-
机械设计是机械工程的重要组成部分,是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是:在各种限定的条件(如材料、加工能力、理论知识和计算手段等)下设计出的机械,即做出优化设计。优化设计需要综合地考虑许多要求,一般有:工作性能、24-01-11 22:57:01
-
机械设计的一般步骤如下:一、需求分析:任何一个设计项目都需要从需求出发,机械设备设计也不例外。在这一阶段,设计师需要与客户进行充分的沟通,了解客户的需求和期望。同时,还要考虑到设备的使用环境、功能要求、技术指标等因素,为后续的设计工作打下基24-01-11 22:54:01
-
机械设计是机械工程的重要组成部分,是机械生产的步,是决定机械性能的主要的因素。机械设计的努力目标是:在各种限定的条件(如材料、加工能力、理论知识和计算手段等)下设计出的机械,即做出优化设计。优化设计需要综合地考虑许多要求,一般有:工作性能、24-01-11 22:51:01

